Quaternion 개념 정리-part4(쿼터니언을 이용한 회전)
January 2, 2017
헬로우 안녕하세요. 이번 포스팅에서는 드디어 쿼터니언 회전에 대해 설명하겠습니다.
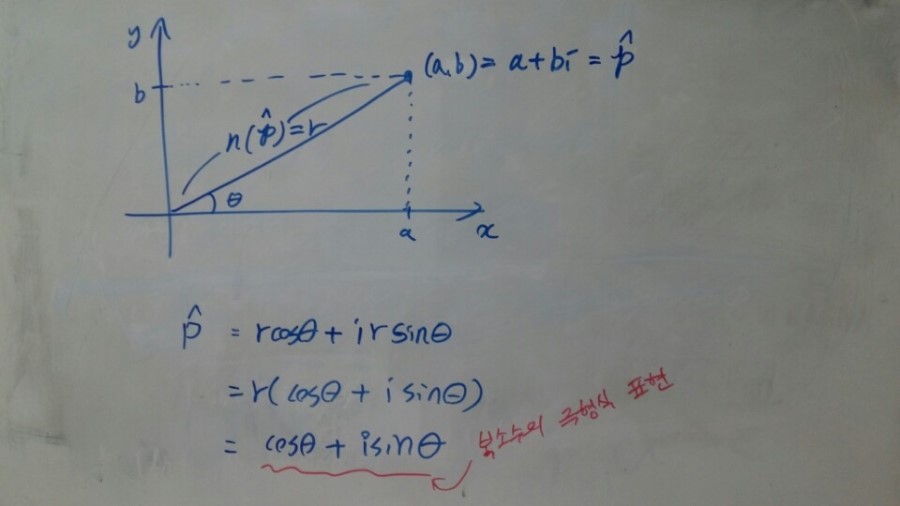
part1에서 복소수는 x값을 실수부로 y값을 허수부로 가지는 형태의 극좌표 표현이 가능하다고 했습니다.
그림으로 나타내면 다음과 같습니다.
[그림1]
만약 복소수의 크기가 1이라고 할 때 복소수는 다음과 같이 오일러 공식의 형태가 나옵니다!!
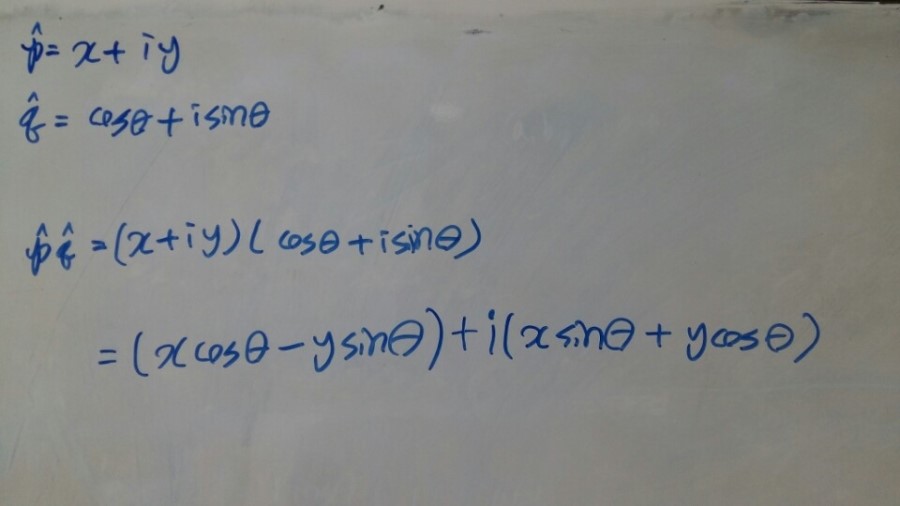
자 그럼 이걸  라고 하고 복소수의 일반형인
라고 하고 복소수의 일반형인  와 곱해봅시다.
와 곱해봅시다.
[그림2]
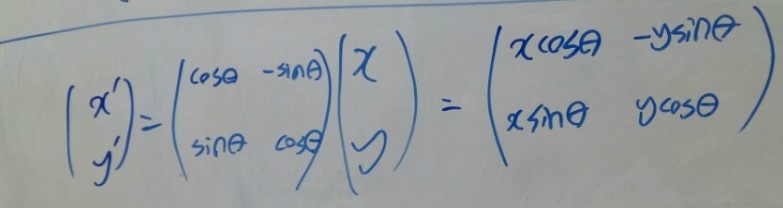
헉! 어디서 이 식을 많이 본 것 같지 않습니까? 그렇습니다. 2차원에서의 오일러 회전 행렬과 같은 모습이 됩니다!
[그림3]
자! 여기서 우리는 어떤 복소수의 일반형 p = x + iy 에 복소수의 극좌표형 q = cos(theta) + isin(theta) 를 곱하면 그것이 p를 구성하는 벡터(x,y)의 회전을 의미한다는 것을 알게되었습니다.
그러면 이것을 3차원으로 확장시켜봅시다.
3차원에서의 쿼터니언 회전을 위해서 우선 회전할 벡터가 필요합니다.
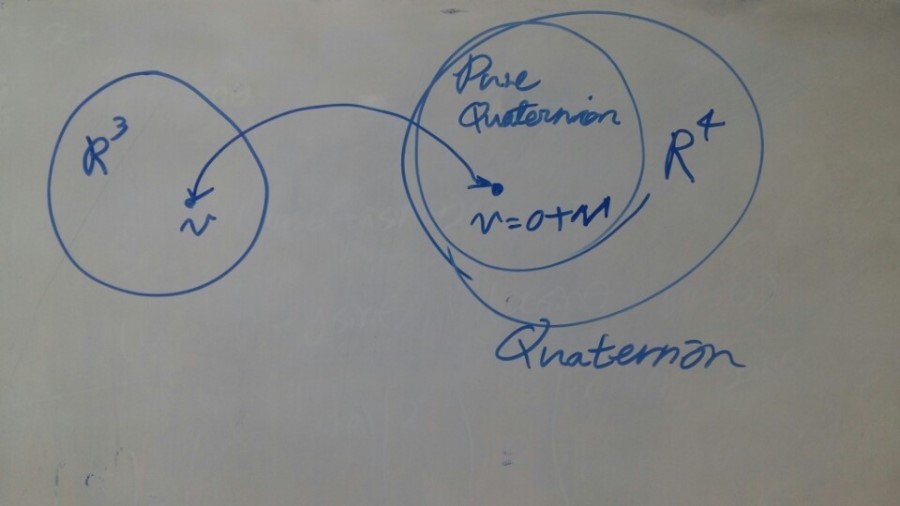
하지만 이 회전할 벡터 자체는 쿼터니언으로 표현될 필요가 있는데 이 쿼터니언을 P 로 표기하면
P = (Pv, Pw)
P = (p,0)
실수부가 0, 허수부가 벡터p인 pure quaternion가 됩니다.
이 작업을 4차원 세상의 쿼터니언과 3차원 세상의 벡터가 소통 가능하게 만드는 과정이라고 생각하시면 됩니다.
이런 느낌
[그림4]
이제 회전하고 싶은 벡터가 생겼으니 회전축 u와 회전각 theta를 통해 회전 쿼터니언 q를 정의할 차례입니다.
이 때 회전 쿼터니언 q의 크기는 1인 unit quaternion이 되어야합니다.
그리고 이 유닛 쿼터니언은 극형식으로 나타내야합니다!
이전 part3에서 은근슬쩍 소개하고 넘어갔었는데 크기가 1인 쿼터니언은 극형식으로 다음과 같이 나타냅니다.
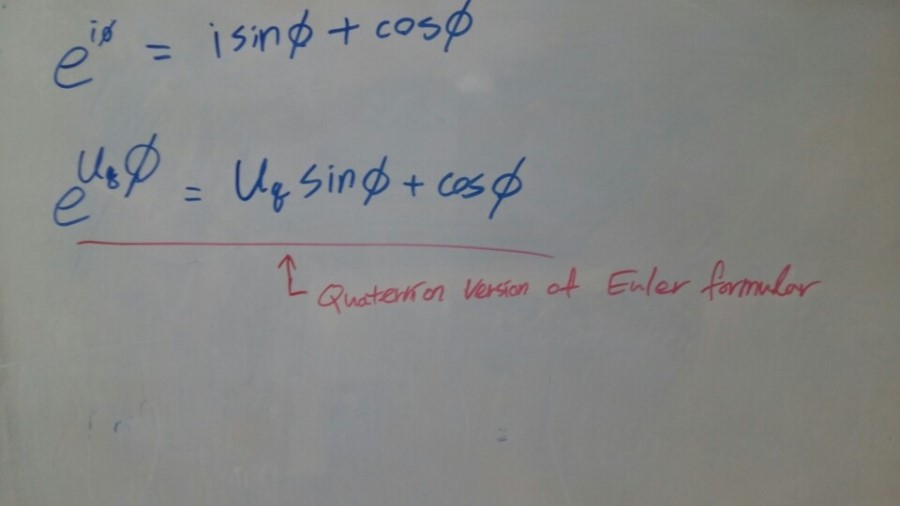
[그림5]
Norm을 계산해보면 Norm(q) = qq* = sin^2 + cos^2 = 1인 것을 확인할 수 있죠
자 그럼 이제 회전하고 싶은 벡터를 나타내는 쿼터니온 P = (Pv, 0),
그리고 회전 자체를 나타내는 쿼터니언 극형식 Q = UqSin(theta) + cos(theta)
를 정의했으니 이제 회전을 계산하는 일만 남았습니다.
Ken Shoemaker 형님의(신발파는사람아님) 쿼터니언 논문에 따르면,
P를 축 Uq를 중심으로 2theta만큼 회전하는 것은 다음과 같이 표현됩니다.

그런데 q는 unit quaternion이므로 다시 이렇게 표현 가능합니다. (part2 그림5 참고)

이 공식의 결과로 우리는 2theta 만큼 회전된 결과를 쿼터니언의 허수부 파트로부터 얻을 수 있습니다!
2theta가 아닌 theta만큼 회전한 결과를 얻고 싶다면 q를 만들때 theta/2를 사용하면 되겠죠
만약 연속해서 회전하고 싶다면 어떻게해야 할까요?
쿼터니언 회전 연산은 concatenation 합니다.
따라서 p를 q만큼 회전시키고 다음 r만큼 회전하는 경우 다음과 같이 표현 가능합니다.
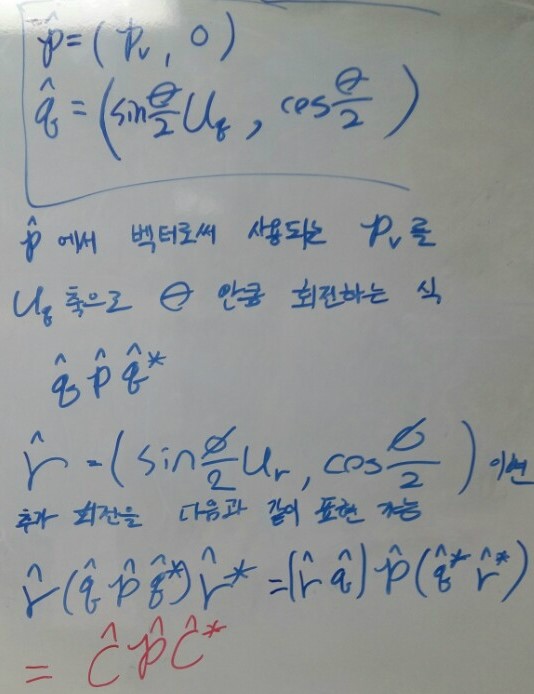
[그림6]
야호! 이제 우리는 쿼터니언을 사용하여 벡터를 원하는 축에 대하여 간단하게 회전하는 것이 가능해졌습니다! Level up!
다음시간에는 Quaternion을 회전행렬로 변환하는 방법과 Spherical Linear Interpolation(구면선형보간)에 대해 설명하도록 하겠습니다.
part5에서 봐요